信息来源:本站 | 发布日期: 2020-04-24 10:19:52 | 浏览量:384572
根据手臂的运动形式,工业机器人分为四种类型。笛卡尔臂可以沿三个笛卡尔坐标移动,圆柱臂可以上下伸缩移动,球形臂可以旋转、俯仰和伸展,关节臂具有多个臂转动关节。
判断工业机器人核心部件是否需要更换,可结合故障表现、运行参数、修换标准综合判定,核心依据如下:一、核心部件典型故障判定减速…
关节机器人的核心技术关键点集中在机械结构设计、精度控制、可靠性与运动控制四个维度,这些是决定关节性能与机器人运动表现的…
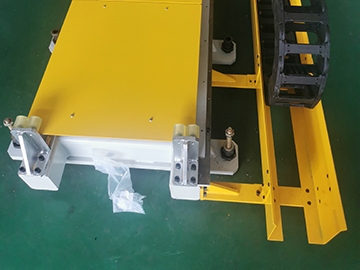
桁架机器人(直角坐标机器人)凭借其独特的结构设计和技术优势,在工业自动化领域展现出显著竞争力。以下是其核心优点的详细归纳:…
工业机器人的未来发展将呈现智能化、网络化、模块化、协作化、绿色化及人形机器人崛起等趋势,具体分析如下:智能化:工业机器人将…
关节机器人凭借其高灵活性、高精度和可编程性,已成为工业自动化领域的核心设备,主要应用于汽车制造、电子装配、物流仓储、金属加…
工业机器人作为自动化生产的核心设备,其组成结构高度集成化、模块化,通过精密的机械、电气和控制系统协同工作,实现高效、精准的…